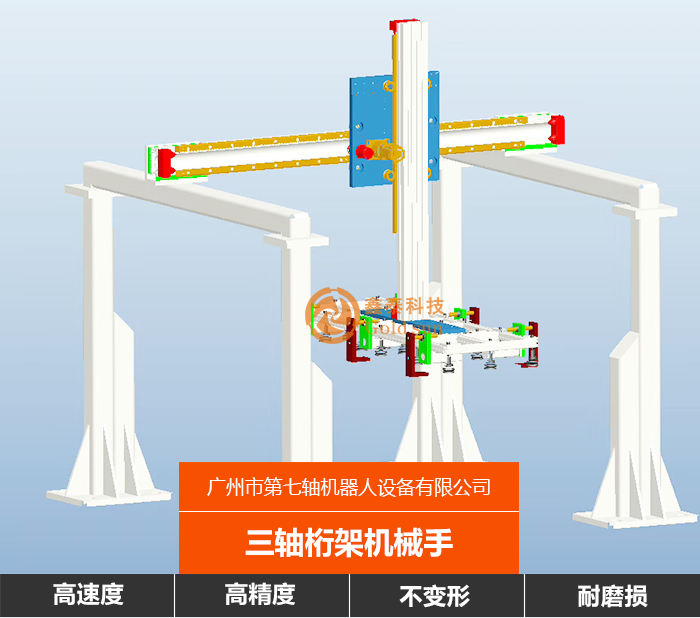
三轴桁架机械手




24小时咨询热线:
18928825067

在工业自动化生产线上,工件经常需要在流水线与机床加工工位之间来回转移。现在在自动化流水线上完成机床上下料,广泛选用通用的龙门桁架机械手―桁架式上下料机械手。关节式工业机器人载荷大、精度高、动作可编程,但是价格比较贵,在转移路径较为简略的情况下运用不合适。龙门桁架机械手适应于数控机床加工工位定位精度要求较高,而且转移动作又较为简略的上下料环节的机械手

桁架包含若干龙门结构的支撑部,在支撑部上设有用于装置机械手的横梁,龙门桁架机械手为三个自由度机械手,桁架机器人包含装置于横梁上的水平运动组件及笔直装置于水平运动组件上的笔直运动组件。垂直运动组件的底部衔接有三爪夹持器,水平运动组件和垂直运动组件,分别包含用于传动的齿轮和齿条,齿轮和齿条设为相互啮合的斜齿。

桁架式机器人的空间运动是用三个相互垂直的直线运动来完成的,因为直线运动易于完成全闭环的位置控制,所以,龙门桁架机械手的桁架式机器人有可能到达较高的位置。为了完成一定的运动空间,桁架式机器人的结构尺度要比其他类型的机器人的结构尺度大许多。
桁架机械手结构简单稳重,成本低,精度较高;齿轮和齿条传动选用斜齿啮合,增加了机械作业的载荷、提高了运动平稳性.
上一篇:机器人第七轴地轨安装注意事项 下一篇:工业机器人辅助行走机构――机器人第七轴地轨

扫一扫,加我吧